Hektor. Projekat je zajednički napor tri institucije. Koordinator projekta je Fakultet elektrotehnike i računarstva Sveučilišta u Zagrebu, a partneri na projektu su Agronomski fakultet Sveučilišta u Zagrebu i Institut za istraživanje mora i priobalja Sveučilišta u Dubrovniku. HEKTOR je trogodišnji projekat koji je započeo u martu 2020. godine. Finansira ga ESI ERDF – Evropski fond za regionalni razvoj.

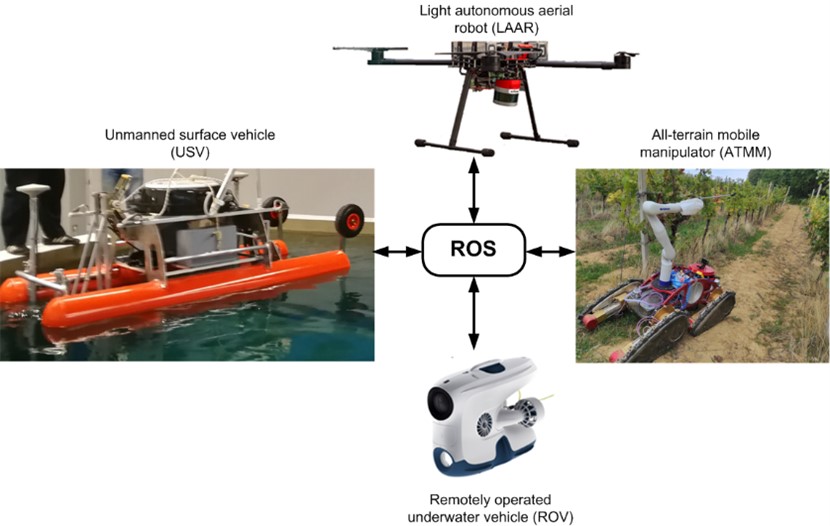
Pregled sistema HEKTOR
HEKTOR se bavi razvojem heterogenog robotskog sistema za vinogradarstvo i akvakulturu. Glavni cilj projekta HEKTOR je razvoj sistematskog rješenja za koordinaciju pametnih heterogenih (pomorskih, zemaljskih i vazdušnih) robota/vozila koji mogu autonomno sarađivati i dijeliti zadatke u otvorenom, nestrukturiranom ili polustrukturiranom prostoru.
HEKTOR je dizajniran kao modularan i autonoman sistem prilagođen različitim misijama u vinogradarstvu i akvakulturi. Naravno sa mogućnošću ljudske intervencije u različitim poslovima, inspekcijskim i interventnim poslovima. Integracija HEKTOR sistema je realizovana kroz ROS Middleware.

Kontrola iz vazduha / kartiranje vinograda

Selektivno prskanje vinograda
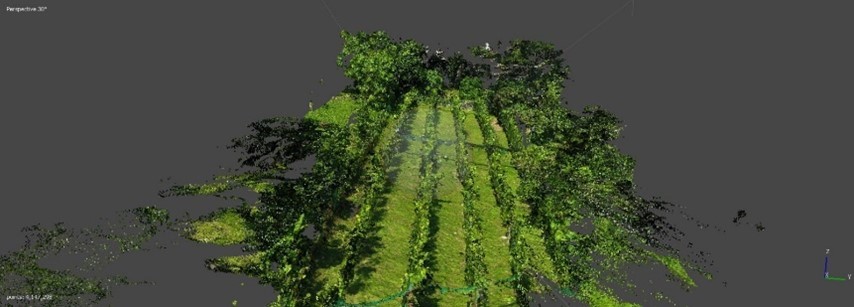
3D modeliranje strmog vinograda
Herktor u vinogradu
U vinogradarstvu se većina vinograda nalazi na brdovitom terenu, što povećava količinu posla potrebnog za uspješano vinogradarenje. Mnogi novi vinogradi u mediteranskim zemljama podignuti su na vrlo strmim terenima Na ovim terenima zadaci kao što su prskanje vinove loze zaštitnim sredstvinma i ručno uklanjanje suvišnih lastara (jalovaka) zahtijevaju izuzetnu fizičku snagu i izdržljivost radnika. To ove zadatke čini posebno zanimljivim za implementaciju robotskih rješenja. Poželjni scenariji u vinogradarstvu uključuju nadzor vinograda, prskanje i uklanjanje jalovaka na osnovu koordinisanog djelovanja mobilnog manipulatora za sve terene (ATMM) i bespilotne letjelice (UAV).
Rezultati projekta HEKTOR uključuju razvoj robota i podsistema koji im omogućavaju zajednički rad. Za više informacija o napretku projekta HEKTOR posjetite https://larics.fer.hr/larics/scientific_projects/hektor ili pogledajte do sada objavljene publikacije projekta:
- Hrabar, I.; Vasiljević, G.; Kovačić, Z. Estimation of the Energy Consumption of an All-Terrain Mobile Manipulator for Operations in Steep Vineyards. Electronics, Vol. 11, no. 2, 217, 2022, https://doi.org/10.3390/electronics11020217 .
- Vatavuk, I.; Vasiljević, G.; Kovačić, Z.; Task Space Model Predictive Control for Selective Vineyard Spraying with a Mobile Manipulator. Applied Sciences, 2022 (to be published).
- Hrabar I., Goričanec J., Kovačić Z., “Towards Autonomous Navigation of a Mobile Robot in a Steep Slope Vineyard,” 2021 44th International Convention on Information, Communication and Electronic Technology (MIPRO), 2021, pp. 1119-1124, https://doi.org/10.23919/MIPRO52101.2021.9596997 .
Naslov orginala: HEKTOR – Heterogeneous autonomous robotic system in viticulture and mariculture (HEKTOR – Heterogeni autonomni robotski sistem u vinogradarstvu i marikulturi. Autor: Zdenko Kovačić). Izvor: https://www.ciencia-e-vinho.com/. Objavljeno: 13.03.2022. by Paula Silva. Prevod: Dragutin Mijatović
POGLEDATI i:
- https://ovinu.info/robot-orezuje-kao-vinogradar/
- https://ovinu.info/robot-kosilica-u-vinogradu/
- https://ovinu.info/vinske-tehnologije-transformisu-globalnu-industriju-vina/
- https://ovinu.info/precizno-vinogradarstvo-tehnologije-i-aplikacije/
- https://ovinu.info/tehnologije-u-preciznom-vinogradarstvu-pregled-stanja-vjestina/
Dobro je znati-ako niste znali? Bakus je potpuno autonomni električni robot za rad u vinogradu – nova vještačka inteligencija kompanije VitiBot (Francuska). Kompanija koja na tržištu električnih robota pomaže vinogradarima u olakšanju rada u vinogradu sa najnovijim tehnološkim rješenjima, nudeći rješenje bez vozača (https://www.vitisphere.com/).