
Mašinski vid – procjena zrelosti grožđa. Mašinski vid (Machine Vision) je sposobnost kompjutera da percipira okolinu. Precizno vinogradarstvo ima za cilj maksimiziranje prinosa i kvaliteta grožđa minimiziranjem ulaznih troškova. Berba grožđa je najvažniji posao u vinogradarstvu jer izbor vremena berbe određuje željeni kvalitet roda. Identifikovanje nivoa zrelosti u vinogradima moglo bi poboljšati efikasnost operacija berbe. Posebno u proizvodnji vina, gdje je optimalno vrijeme berbe, povezano sa specifičnim koncentracijama određenih jedinjenja, snažno povezano sa željenim kvalitetom vina.
Precizno vrijeme za berbu zavisi o lokaciji, uslovima okoline, trajanju vegetacije, sorti grožđa, opterećenju čokota vinove loze i namjeni grožđa, odnosno u potrošnji u svježem stanju ili proizvodnji vina. Stoga je procjena tačnog vremena berbe prilično izazovna. Međutim, procjena zrelosti grožđa je manje složen proces i obavlja se redovno tokom šarka (promjena boje bobica).
Ocjena stepena zrelosti grožđa
Mašinski vid – procjena zrelosti grožđa. Tradicionalnu procjenu zrelosti vrše vinogradari-vinari koji ocjenjuju stepen zrelosti na osnovu senzornih atributa u kombinaciji sa iscrpnim uzorkovanjem nakon čega slijede hemijske analize. Ovo posljednje nije ekonomski izvodljivo, posebno za komercijalne vinograde. Štaviše, postupak je subjektivan, zavisno o osobi koja vrši senzornu procjenu i uzorkovanje.
Osim toga, hemijske analize su destruktivne, dugotrajne i obično uključuju sofisticiranu opremu koja je skupa i kojom je teško upravljati nestručnjacima. Nadalje, destruktivne analize pretpostavljaju opsežno i često uzorkovanje koje se radi samo na konačnom broju uzoraka grožđa; statistička relevantnost implicira gubitak preciznosti.

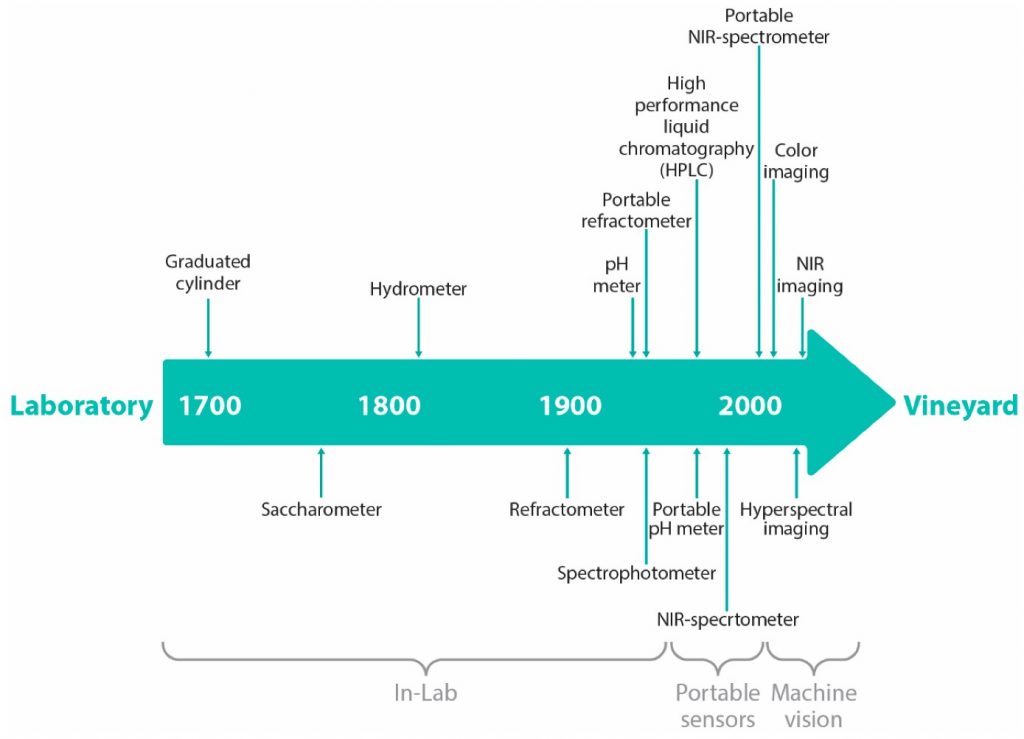
U tom kontekstu treba tražiti automatska rješenja za procjenu zrelosti grožđa. U posljednje vrijeme istraživanja se fokusiraju na razvoj nedestruktivnih, isplativih i ekološki prihvatljivih tehnika. Mašinski vid (vizija) se trenutno prekomjerno koristi za poslove vezane za poljoprivredu. Tehnološko poboljšanje hardvera obezbeđuje senzore koji kombinuju visoke performanse i razumne cijene. Inovativni softverski dizajn obezbeđuje algoritme koji mogu da podrže efikasne sisteme vještačkog uvida u realnom vremenu. U tom cilju, mašinski vid je uveden u primjene na terenu za procjenu zrelosti grožđa. Kao brza, efikasna i atraktivna alternativa hemijskoj analizi, zbog svoje jednostavnosti, fleksibilnosti i niske cijene.
Tokom zrenja dolazi do mnogih fizičkih i biohemijskih promjena koje utiču na karakteristike grožđa kao što su boja i morfologija. Pristupi mašinskog vida mogu se nositi sa bojom, oblikom i teksturom iz analize slika grožđa, nudeći automatizovane, nedestruktivne, brze i isplative tehnike.
RGB
Crveno-zeleno-plavo (Red-Green-Blue – RGB) slikanje u boji je najisplativiji način za određivanje vrijednosti i karakteristika kanala boja kao što su tekstura i oblik. Međutim, u RGB slikama u boji dostupne su samo tri vidljive trake što rezultira konačnom sposobnošću identifikacije. RGB kanali boja pokazuju visoke nivoe korelacije i prikazuju manji raspon boja nego što to ljudske oči mogu uočiti. Nijedan prostor boja ne može savršeno predstavljati boju. Istražuju se različiti prostori boja kako bi se odgovorilo na probleme sa kojima se drugi ne mogu nositi.
Hiperspektralno snimanje se smatra analitičkim alatom koji se razvija u procesu. Može se koristiti umjesto RGB-a za zahtjevnije aplikacije jer može snimiti brojne opsege u širokom spektralnom opsegu. Ovi pojasevi su susjedni i prošireni su izvan vidljivog dijela spektra. Hiperspektralna slika povezuje spektroskopiju sa konvencionalnim slikama i stoga se mogu dobiti i spektralne i prostorne informacije objekta.
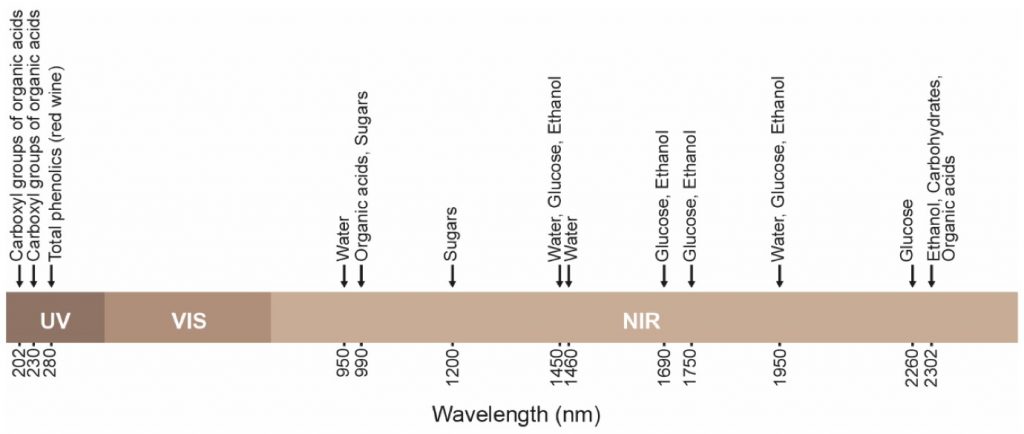
Bliska infracrvena (Near InfraRed – NIR) spektroskopija se takođe pokazala kao moćno analitičko sredstvo za određivanje bioaktivnih jedinjenja u grožđu, kao što su rastvorljive čvrste materije i pH. U NIR spektroskopiji, prvo se NIR zračenje primjenjuje na objekt, a zatim se mjeri propušteno/reflektovano zračenje. Spektralne karakteristike zračenja se mijenjaju kako ono ulazi u objekt zbog rasipanja i apsorpcije koje zavise od talasne dužine.
Modifikacije zavise od hemijskog sastava objekta i svojstava rasipanja svjetlosti. Glavna prednost NIR spektroskopije u odnosu na ostale opisane metode, RGB i hiperspektralno snimanje, je priprema uzorka bez hemikalija. To je sposobnost da se efikasno odrede optička svojstva grožđa koja su usko povezana sa hemijskim i fizičkim svojstvima, a samim tim i, do zrelosti.
Roboti za berbu
Praćenje zasnovano na mašinskom vidu predstavlja izazov kada su u pitanju poljoprivredni proizvodi kao što je grožđe, čije su promjenljive veličine, oblika, boje i teksture. Ove karakteristike nisu stabilne, ali variraju tokom vegetacije. Štaviše, zeleno grožđe je još teže locirati zbog iste boje kao i lišće. Javni skupovi podataka o grožđu moraju uključivati promjenjive slučajeve, kao što su grožđe svih boja u svim fazama rasta, različite sorte, slučajevi blokiranja lišća i lastara i slike pod različitim osvjetljenjima.
Roboti za berbu obično uključuju robotsku ruku i kameru postavljenu na robotsko vozilo. Neravnine terena bi izazvale vibracije vozila, što bi rezultiralo nestabilnim mjerenjima vida. Praksa defolijacije mogla bi otkriti grozdove i olakšati otkrivanje i uklanjanje grozdova. Štaviše, robot bi u idealnom slučaju trebalo da bere u uslovima stabilnog osvjetljenja. Slike za obuku algoritama mašinskog vida treba da budu optimalno snimljene u isto vreme i pod istim uslovima osvjetljenja, udaljenosti, visine itd.
Drugi izazov je kompromis između brzine, tačnosti i robusnosti. Općenito, učinkoviti sistemi zahtijevaju veću preciznost u kraćem vremenu obrade. Vrijeme obrade je od velike važnosti kada su u pitanju aplikacije u realnom vremenu, do te mjere da se žrtvuje malo tačnosti kako bi se postiglo bolje vrijeme obrade u pravcu automatizacije dugotrajnih procesa.
Razvoj agrobota kombinuje mnoge discipline i specijaliste: agronome, inženjere, mehatroniku, inteligentno modeliranje, dizajn sistema, duboko učenje, mašinski vid, itd. Zahtjevi takvog robota traže moćnu opremu i talentovane stručnjake. Visoko precizne robotske ruke, spretni krajnji efektori, moćni računarski uređaji, precizni sistemi za snimanje i odgovarajući robusni algoritmi.
Postojeće tehnologije
Ovo posljednje predstavlja dodatni izazov, nisku cijenu razvoja agrobota. Postojeće tehnologije i algoritmi mogu prevazići mnoge poteškoće u vremenu obrade i pokazati visoku tačnost uz relativno niske troškove. Međutim, još uvijek ima prostora za poboljšanja. Budući agroboti moraju se oslanjati na pristupačnu opremu i biti sposobni za donošenje odluka u složenijim situacijama, reagirajući na iznenadne promjene okoline.
Prema gore navedenom, integracija algoritama mašinskog vida za procjenu zrelosti u robote za berbu treba da prevaziđe brojne izazove. To je dug i složen proces koji istraživači već vode.
Vidi sve na: https://www.mdpi.com/2311-7524/7/9/282
Izvor: https://www.ciencia-e-vinho.com/ . Naslov orginala: Machine Vision for Ripeness Estimation in Viticulture Automation (Mašinski vid za procjenu zrelosti u automatizaciji vinogradarstva). Objavljeno: 21.11.2021. Vassilis G. Kaburlasos. Prevod: Dragutin Mijatović
Pogledati i: https://ovinu.info/tehnologije-u-preciznom-vinogradarstvu-pregled-stanja-vjestina/ i https://ovinu.info/precizno-vinogradarstvo-osnove/ i https://ovinu.info/precizno-vinogradarstvo-tehnologije-i-aplikacije/


